De geschiedenis van 2024

Op 1 januari om 03:40 UTC was het India die de eerste lancering van 2024 maakte een PSLV-DL raket met in de fairing de XPoSat satelliet.
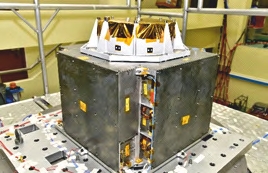
De X-ray Polarimeter Satellite (XPoSat) is de eerste astronomie satelliet van de Indiase ruimtevaartorganisatie ISRO die onderzoekt doet naar de polarisatie van kosmische röntgenstraling in het heelal.
Aan boord van deze satelliet bevinden zich twee instrumenten:
- POLIX – Polarimeter Instrument in X-Rays en meet de polarisatie van röntgenstraling in de 8-30keV energieband van ongeveer 50 potentiële kosmische bronnen.
- XSPECT – X-ray Spectroscopy en Timing onderzoekt de spectrale en temporale kosmische straling in de 0,8-15 keV energieband.
De wetenschappelijke doelen van de missie zijn:
- Het bestuderen van de verdeling van het magnetisch veld, geometrische anisotropieën, uitlijning ten opzichte van de gezichtslijn, aard van de versneller in galactische kosmische röntgenbronnen door het meten van de polarisatiegraad en de hoek ervan te meten.
- Structuur en geometrie van het magnetisch veld van neutronensterren, mechanisme van röntgenstraling en het verband met de helderheid en massa van de accretiesnelheid van actieve pulsars.
- Het verkrijgen van gedetailleerd begrip van binaire bronnen van galactische zwarte gaten.
- Bestuderen en bevestigen of de productie van röntgenstraling afkomstig is van de poolkap van neutronensterren of buitenste kap van de magnetosfeer van een pulsar.
- Onderscheid maken tussen het synchrotronmechanisme en thermische emissie in supernovaresten.

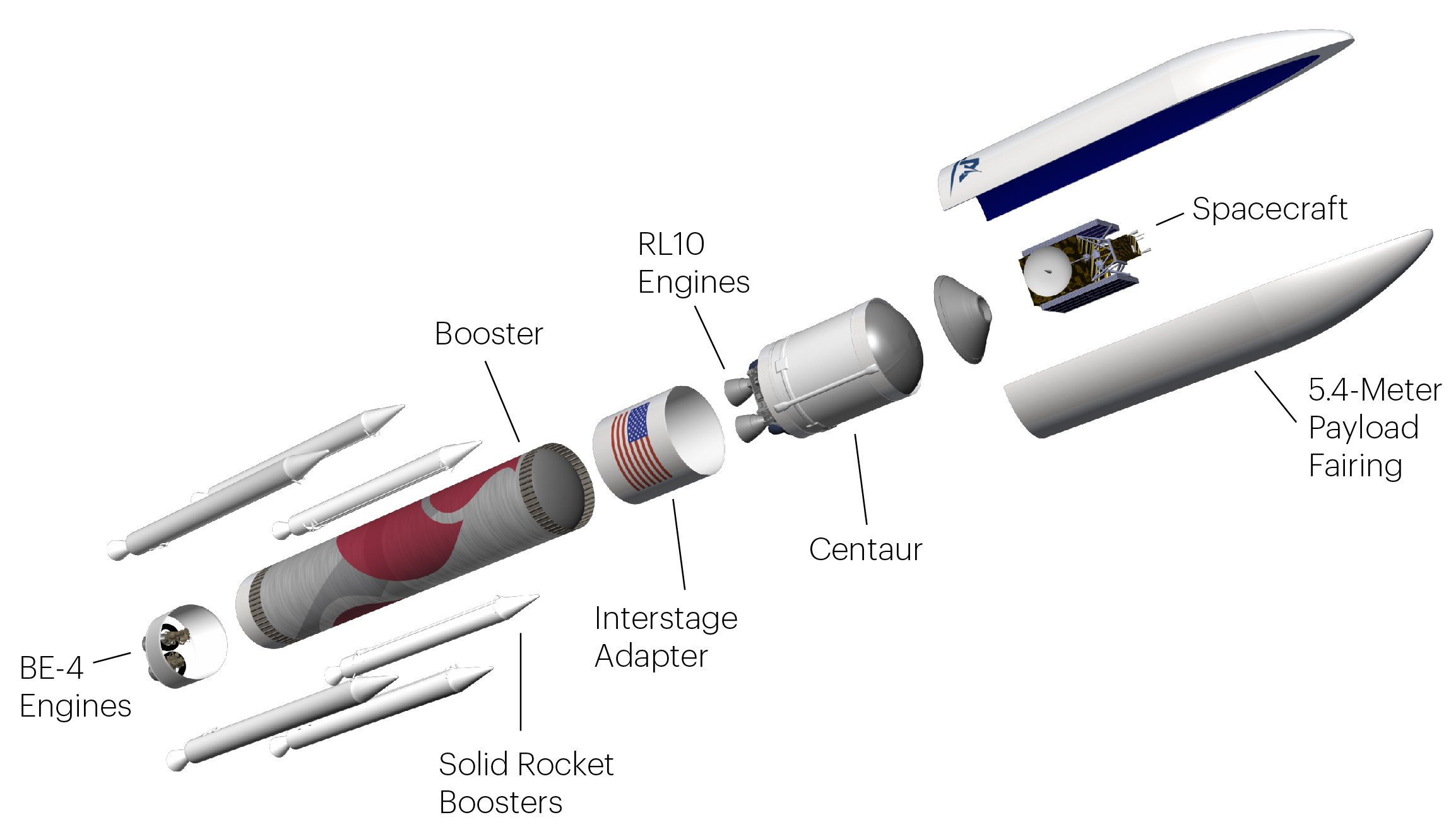
Vanaf lanceerbasis Cape Canaveral vond op 8 januari om 07:18 UTC de eerste orbitale lancering plaats van de Vulcan Centaur VC2S raket.
Deze heavy-lift draagraket is ontwikkeld door United Launch Alliance (ULA) en is in eerste instantie ontworpen voor de lancering van Amerikaanse veiligheidssatellieten om zo te kunnen voldoen aan de specificaties van het National Security Space Launch programma (NSSL) en die van de inlichtingendiensten hieraan stellen.
Specificaties:
Aantal rakettrappen 2
Aantal boosters 2 stuks GEM-63XL (Graphite-Epoxy Motor)
Raketmotoren:
- Eerste trap 2 stuks BE-4 (Blue Engine)
- Tweede trap 2 stuks Centaur-V RL10C-1
Afmetingen:
- Hoogte 61,6 meter
- Diameter 5,4 meter
Lanceer lading:
- LEO 19.000 kilogram
- MEO 3.900 kilogram
- GEO 2.600 kilogram
- TLI Maan 6.300 kilogram

Op 8 januari om 07:18 UTC werd de eerste missie van de Amerikaanse firma Astrobotic Technology naar de maan gelanceerd.
Aan boord van de raket was de maanlander Peregrine die rond 24 februari een landing op de maan zou maken. Kort na de lancering waren er problemen met de aandrijving waardoor het ruimtevaartuig anders manoeuvreert dan de bedoeling was. Een andere mankement was het opladen van de accu’s, doordat de zonnepanelen niet volledig kunnen worden gericht op de zon is de capaciteit van de accu’s niet gegarandeerd om de systemen naar behoren te kunnen laten functioneren.
Het doel van commerciële maanlander was om lading op het maanoppervlak brengen.
Na zes dagen keerde het ruimtevaartuig weer terug naar aarde en verbrande op 18 januari in de atmosfeer boven de Stille Oceaan.
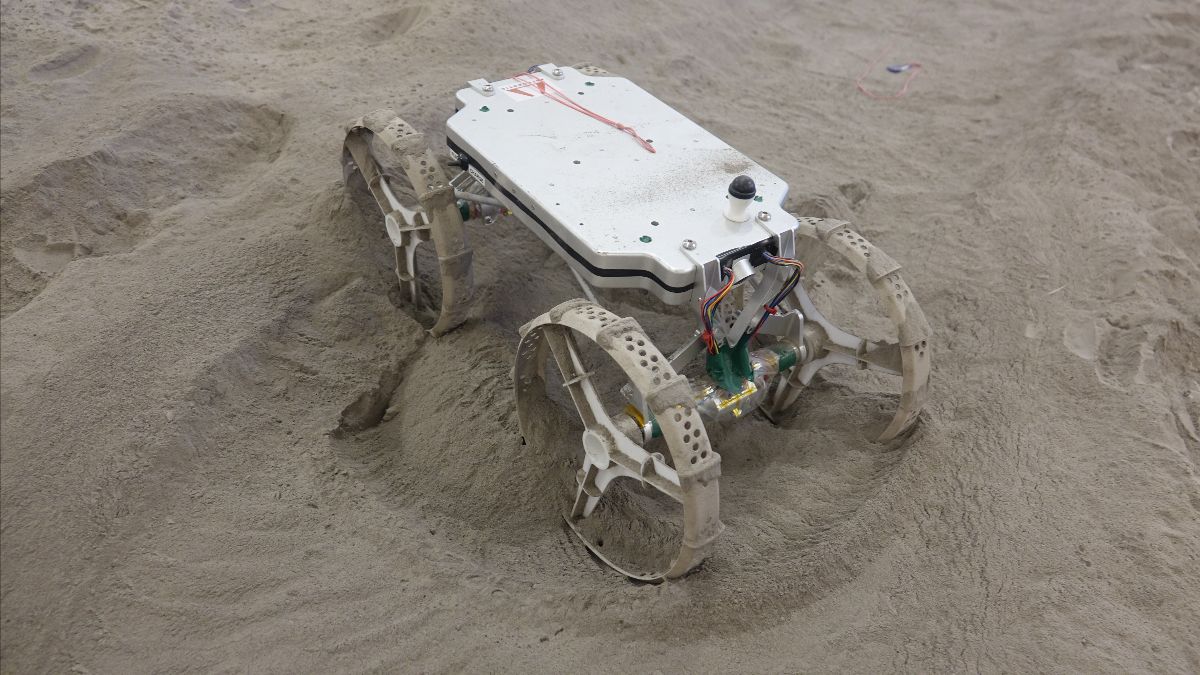
De maanlander Iris werd met de Peregrine op 8 januari om 07:18 UTC gelanceerd vanaf Cape Canaveral en is een kleine maanrover van de organisatie Astrobotic Technology.
Omdat er technische problemen waren met de Peregrine moet deze maanrover ook als verloren worden beschouwd.
Het doel van deze maanrover was om een praktisch modulaire rover te creëren dat vergelijkbaar is met dat van CubeSats. Hierdoor kunnen toekomstige kleine maanrovers gemakkelijk worden aangepast met compatibele delen voor het doel waarvoor ze zijn ontworpen.
Het Colmena project aan boord van de Peregrine die op 8 januari om 07:18 UTC werd gelanceerd.
Dit robotproject van vijf robots waren de eerste Latijn-Amerikaanse wetenschappelijke instrumenten die waren ontworpen om het maanoppervlak te gaan verkennen en werden gemaakt aan de Nationale Autonome Universiteit van Mexico (NUAM).
Omdat er technische problemen waren met de Peregrine moet dit robotproject ook als verloren worden beschouwd.
Elke robot had een gewicht van 60 gram en een diameter van 12 centimeter en zijn zo ontworpen dat ze van de Peregrine gekatapulteerd konden worden op het maanoppervlak. Zodra de robots op het maanoppervlak terecht zouden komen worden ze geactiveerd en zal de kalibratie plaatsvinden waarna ze elkaar gaan zoeken en als een zwerm gaan functioneren. Zodra deze fase achter de rug is zou de wetenschappelijke missie beginnen; het karakteriseren van het maanstof met elektrostatische lading.

Vanaf de Chinese lanceerbasis Xichang werd op 9 januari om 07:03 UTC de Einstein Probe gelanceerd.
De Einstein Probe is een missie van de Chinese Academie van Wetenschappen (CAS) in samenwerking met de Europese ruimtevaartorganisatie ESA en het Max Planck Instituut voor Buitenaardse Fysica (MPE).
De doelstellingen van deze driejarige missie is het afspeuren van het heelal naar kosmische variabele objecten van voorbijgaande verschijnselen die in röntgenlicht schijn.
De probe zal ook licht detecteren van gammaflitsen, supernova’s, zonnevlammen van andere sterren en gebeurtenissen in het zonnestelsel, zoals emissie van kometen.


Op 11 januari om 05:30 UTC was de eerste lancering van de Gravity-1 vanaf lanceerplatform Dongfang Hangtiangang in de Gele Zee.
Deze raket wordt ook wel Yinli-1 genoemd wordt aangedreven door vastebrandstofmotoren en is ontworpen door de Chinese firma OrienSpace.
Specificaties:
Aantal rakettrappen 3
Aantal boosters 4 stuks
- Raketmotoren:
- Eerste trap 1 stuks
- Tweede trap 1 stuks
- Derde trap 1 stuks
Afmetingen:
- Hoogte 31,4 meter
- Diameter 3,8 meter
Lanceer lading:
- LEO 6.500 kilogram
- SSO 4.200 kilogram


Foto v.l.n.r.: Marcus Wandt, Walter Villadei, Michael López-Alegría en Alper Gezeravci.
Op 18 januari om 21:49 UTC werd vanaf lanceerbasis Kennedy Space Center de Ax-3 gelanceerd.

Aan boord van de Crew Dragon waren vier astronauten van Axiom Space, Turkse Ruimtevaartorganisatie, Italiaanse Luchtmacht en ESA/Zweedse Ruimtevaartorganisatie die een ruimtevlucht maakten naar het International Space Station.
Na een vlucht van anderhalve dag koppelde het ruimtevaartuig aan de koppelingsadapter Harmony van het ISS.
Voor drie van de vier astronauten was het de eerste ruimtereis. Voor Michael López-Alegría was dit zijn zesde vlucht en Walter Villadei maakte eerder een suborbitale vlucht, echter dit is zijn eerste orbitale ruimtereis.Op 7 februari werd de Crew Dragon ontkoppeld en viel terug naar aarde om na bijna twee dagen later op 9 februari een geslaagde landing te maken in de Atlantische Oceaan.

Vanaf lanceerbasis Kennedy Space Center werd op 15 februari om 06:05 UTC een maanlander gelanceerd.
De maanlander Nova-C ook wel Odysseus genoemd van de firma Intuitive Machines (IM) en maakt deel uit van het Commerciële Lunar Payload Services (CLPS) programma wat ontwikkeld is om kleine ladingen op de maan te zetten.
De maanlander landde op 21 februari op de zuidpool van de maan en was de eerste Amerikaanse landing sinds Apollo 17 landde op 11 december 1972. De landing ging niet vlekkeloos want de maanlander kwam op zijn kant terecht.
NASA heeft voor deze IM-1 missie zes ladingen:
- Lunar Node 1 Navigation Demonstrator (LN-1):
- LN-1 is een experiment ter grootte van een CubeSat dat autonome navigatie zal demonstreren ter ondersteuning van toekomstige oppervlakte- en baanoperaties.
- Stereocamera’s voor onderzoek van het maanoppervlak (SCALPSS):
- SCALPSS zal video- en fotogegevens tijdens de landing vastleggen van de pluim van de maanlander.
- Low Frequency Radio Observations for the Near Side Lunar Surface (ROLSES):
- ROLSES zal een laagfrequent radio-ontvangersysteem gebruiken om de van de foto-elektronen de dichtheid en de schaalhoogte te bepalen.


- Navigatie Doppler Lidar voor nauwkeurige snelheids- en afstandsdetectie (NDL):
- De NDL is een op lichtdetectie en afstandsbepaling gebaseerde (LIDAR) sensor die tijdens de afdaling en landing van de NOVA-C uiterst nauwkeurige snelheids- en afstandsbepaling zal leveren die de navigatieprecisie nauwkeurig zal regelen voor een zachte en gecontroleerde landing op de maan.
- Radio Frequency Mass Gauging (RFMG):
- De RFMG is een drijfgasmeetapparaat dat een RF-signaal met laag vermogen gebruikt om veranderingen in het vloeistofniveau en de vloeistofconfiguratie te meten. Het apparaat bevindt zich in de voortstuwingstank en werkt op een ultra laag energieniveau voor alleen tankbewaking.
- Laserretroreflectorar (LRA):
- LRA is een verzameling van acht retro-reflectoren van 1,25 centimeter, een uniek soort spiegel die wordt gebruikt om afstand te meten, die op de NOVA-C zijn gemonteerd. Deze spiegel weerkaatst laserlicht van andere ruimtevaartuigen die in een baan draaien of landen om de positie van de NOVA-C nauwkeurig te bepalen.
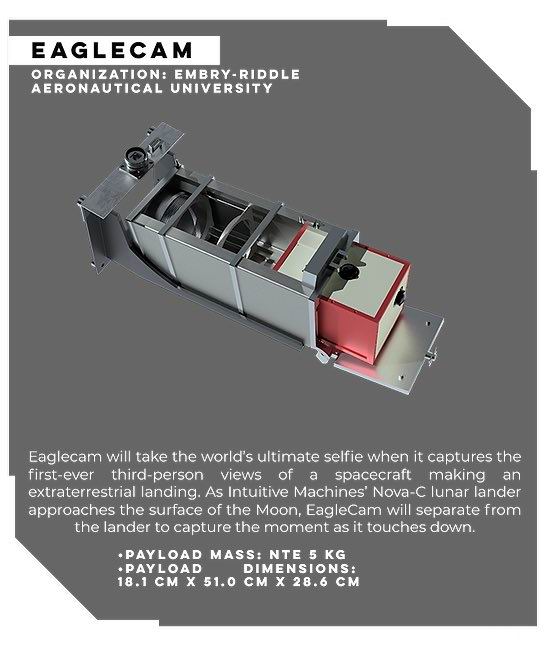
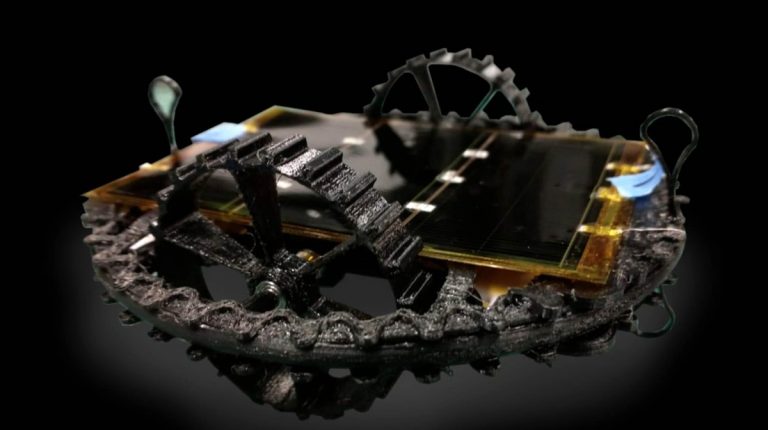
Aan boord van de maanlander Nova-C die op 15 februari werd gelanceerd is de EagleCam.
De EagleCam-camera werd vlak voor de landing losgelaten en landde op 21 februari op de maan, ongeveer 30 meter boven het maanoppervlak, en maakt foto’s van de stofpluim terwijl de maanlander NOVA-C afdaalt. EagleCAM is bedoeld om voor de allereerste keer een buitenaardse landing van een ruimteschip vast te leggen en om nieuwe wetenschappelijke bevindingen aan het licht te brengen door middel van beelden van de stofpluim, analyse van de stofophoping en beelden van het maanoppervlak.
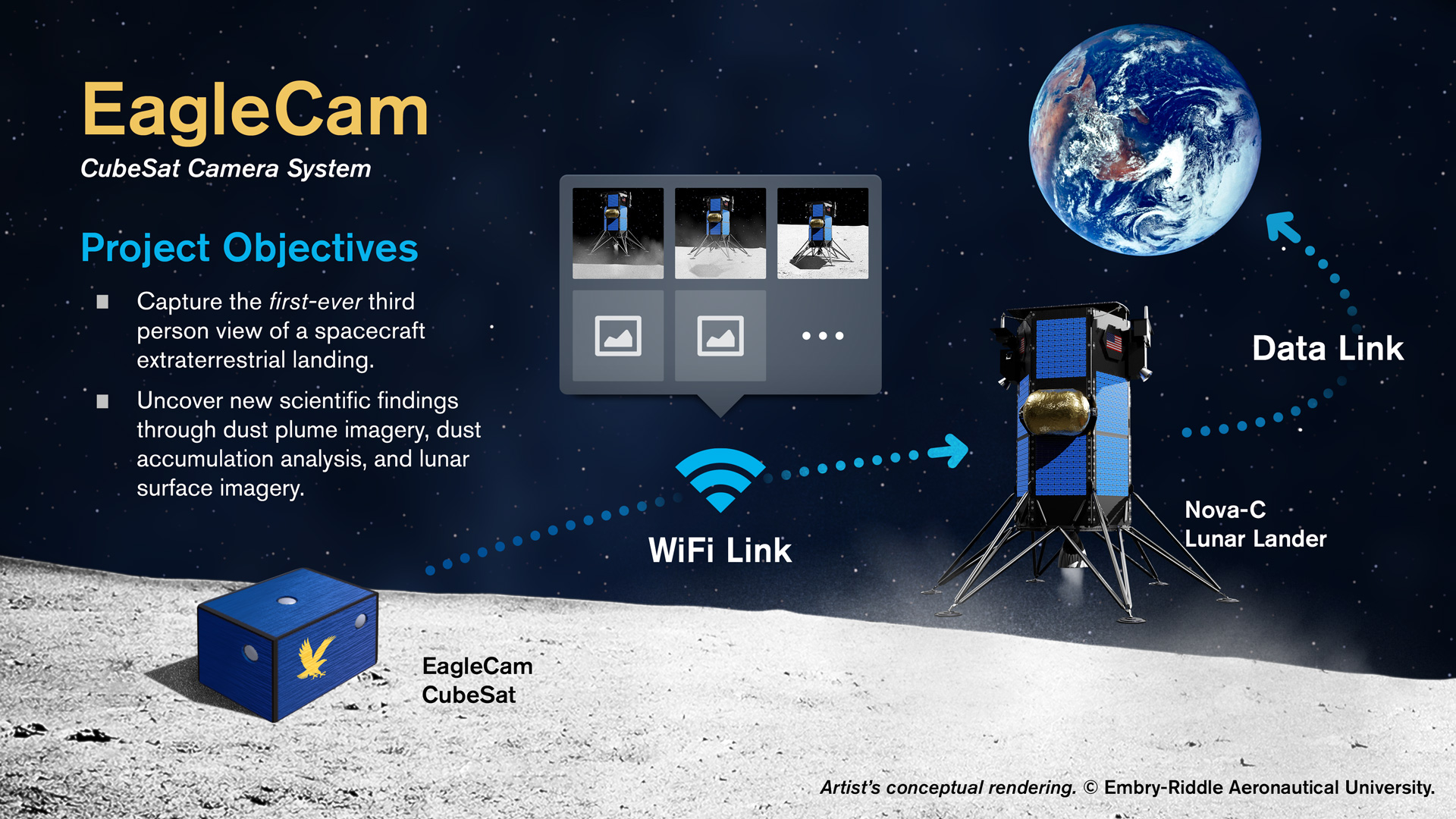
Het CubeSat camerasysteem wordt ontworpen en gebouwd door technische studenten en onderzoekers van de Embry-Riddle Aeronautical University.

Op 4 maart om 03:53 UTC werd voor de vijfde keer de Endeavour gelanceerd met vier astronauten aan boord vanaf lanceerbasis Kennedy Space Center en koppelde ruim een dag later aan de Harmony-Forward module van het International Space Station.
Het was de achtste operationele vlucht van SpaceX met het ruimtevaartuig Crew Dragon USCV-8 naar het International Space Station van het Commercial Crew Program.
De vier astronauten maken deel uit van ISS-Expeditie 70 en 71.
Foto v.l.n.r.: Alexander Grebenkin, Michael Barratt, Matthew Dominick en Jeanette Epps.


Vanaf de nieuw Japanse lanceerbasis Space Port Kii werd de eerste KAIROS raket gelanceerd op 13 maart om 02:01 UTC. Enkele seconden na de lancering werd het Autonomous Flight Termination System (AFTS) geactiveerd, waarna de raket explodeerde.
KAIROS staat voor Kii-based Advanced & Instant Rocket System en is een viertrapsraket van de commerciële firma Space One.

Specificaties:
Aantal rakettrappen 4
Aantal boosters 0 stuks
Raketmotoren:
Eerste trap B1 stuks vaste brandstof
Tweede trap B2 stuks vaste brandstof
Derde trap B3 stuks vaste brandstof
Vierde trap 1 stuks vloeibare stuwstof
Afmetingen:
Hoogte 18 meter
Diameter 1,35 meter
Lanceer lading:
LEO 250 kilogram
SSO 150 kilogram

Op 14 maart om 13:25 UTC werd de Starship raket gelanceerd vanaf lanceerbasis Starbase in Texas van SpaceX.
Deze derde testvlucht van de tot nu tot grootste herbruikbare raket ooit bestaat uit twee rakettrappen waarvan de eerste trap een Super Heavy Booster en de tweede trap het ruimtevaartuig Starship is.
De lancering verliep goed net als de scheiding van de eerste en tweede trap van de raket. De eerste trap zou landen in de Golf van Mexico maar explodeerde op ongeveer 462 meter daarboven door problemen met de raketmotoren.

De tweede trap, Starship S28, bereikte de ruimte en voerde daar enkele tests uit. Hierna kwam Starship weer terug naar aarde maar bij binnenkomst van de atmosfeer viel de telemetrie uit en kon het ruimteschip als verloren worden beschouwd.
Ondanks de fatale afloop van de eerste als tweede trap wordt deze vlucht toch als een succes beschouwd.
China lanceerde op 20 maart om 00:31 uur UTC een Long March 8 vanaf 2024-051A. Deze lancering met aan boord de Queqiao-2 was de start voor de communicatie ondersteuning voor de aankomende Chang`e-6, 7 en 8 missies naar de maan.
De communicatiesatelliet Queqiao-2 werd op 24 maart in een L2 Halo-baan (Earth-Moon L2 Lagrange Point) gebracht, dit is z’n 445.000 kilometer van de aarde. Deze satelliet heeft naar verwachting een levensduur van 8-10 jaar en is daarom van belang voor andere Chinese missies naar de maan.

Daarnaast zijn er twee mini maan satellieten aan boord van de Queqiao-2 op 24 maart in een baan om de maan gebracht, dit zijn de Tiandu-1 en Tiandu-2. Deze twee satellieten hebben als doel de communicatie en navigatie van de Queqiao-2 te verifiëren.

Op 23 maart om 12:36 UTC werd de Soyuz-MS 25 gelanceerd met drie kosmonauten aan boord vanaf Baikonur Cosmodrome.
De driekoppige bemanning kwam uit Rusland, Wit-Rusland en de USA.
Oleg Novitsky en Marina Vasilevskaya verlieten het ruimtestation op 6 april met de Soyuz-MS 24 en landen enkele uren later op de Steppe van Kazachstan.
Foto v.l.n.r.: Tracy Caldwel-Dyson (NASA), Oleg Novitsky (Roscosmos) en Marina Vasilevskaya (BSA).
Vanaf Jiuquan Satellite Launch Center werd op 25 april om 12:59 UTC de Shenzhou 18 gelanceerd.
De aan boord zijnde drie taikonauten, maakten deel uit van Expeditie 6 en 7, en koppelden succesvol dezelfde dag aan de Tianhe module van het Tiangong Space Station.
De Shenzhou 18 bestaat uit drie delen een orbitale module, in het midden de terugkeer module voor de taikonauten en aan de achterkant een servicemodule met motoren, brandstoftanks en zonnepanelen.
Foto v.l.n.r.:, Li Guangsu, Ye Guangfu en Li Cong.

Vanaf Wenchang Satellite Launch Center werd op 3 mei om 09:27 de Chang’e 6 gelanceerd.
Deze maanlander van de Chinese ruimtevaartorganisatie CNSA had als doel het verzamelen van maangrond en maanstenen op de achterkant van de maan en dit retour brengen naar de aarde. Om dit te bereiken was het ruimtevaartuig uitgerust met een boor en scheppen om de betreffende twee kilogram aan maanmonsters te verzamelen.

De landing van de maanlander was op 1 juni 22:23 UTC in het Apollo Crater gebied aan de achterzijde van de maan.
De ICUBE Q, ook wel ICUBE Qamar genoemd, is een kleine Pakistaanse satelliet die meelift met de Chang’e 6 die op 3 mei werd gelanceerd. Het ruimtevaartuig bestaat uit twee delen namelijk het scheidingsmechanisme met de spanningsregelkast en de montage beugel.
Deze kleine satelliet weegt ongeveer 7 kilogram en heeft een levensduur van ongeveer drie maanden en werd op 8 mei van de het ruimtevaartuig Chang’e ontkoppeld. Het ruimtevaartuig herbergt twee optische camera’s voor het fotograferen van het maanoppervlak en is voorzien van de instrumenten voor houdingscontrole, thermisch beheer en communicatie.
De missie heeft de volgende doelstellingen:
- Succesvolle scheiding van de Chang’e 6.
- Het vast leggen van de scheiding door camerabeelden.
- Bevestiging van de werking van ICUBE Q middels het ontvangen van een bakensignaal.
- Fotograferen van de het maanoppervlak, de aarde en het ruimtevaartuig zelf.
- Het vergaren van gegevens over het magnetisch veld van de maan.

Vanaf Cape Canaveral werd de eerste bemande Starliner Crew Flight Test (CFT) gelanceerd op 5 juni om 14:52 UTC. Na twee onbemande testvluchten, vertragingen en twee afgebroken lanceringen konden de astronauten eindelijk gelanceerd worden. De eerste lanceerpoging was op 7 mei en de tweede op 1 juni.

Foto v.l.n.r.: Sunita Williams en Barry Wilmore.

Op 6 juni om 12:50 UTC werd de Starship raket gelanceerd vanaf lanceerbasis Starbase in Texas van SpaceX.
Deze vierde testvlucht van de tot nu tot grootste herbruikbare raket ooit bestaat uit twee rakettrappen waarvan de eerste trap een Super Heavy Booster en de tweede trap het ruimtevaartuig Starship is.
De lancering verliep goed net als de scheiding van de eerste en tweede trap van de raket. De eerste trap maakte een geslaagde gesimuleerde landing in de Golf van Mexico.
De tweede trap, Starship S29, bereikte de ruimte en voerde daar enkele tests uit. Hierna kwam Starship weer terug naar aarde en maakte ruim een uur later een geslaagde gesimuleerde landing in de Indische Oceaan.
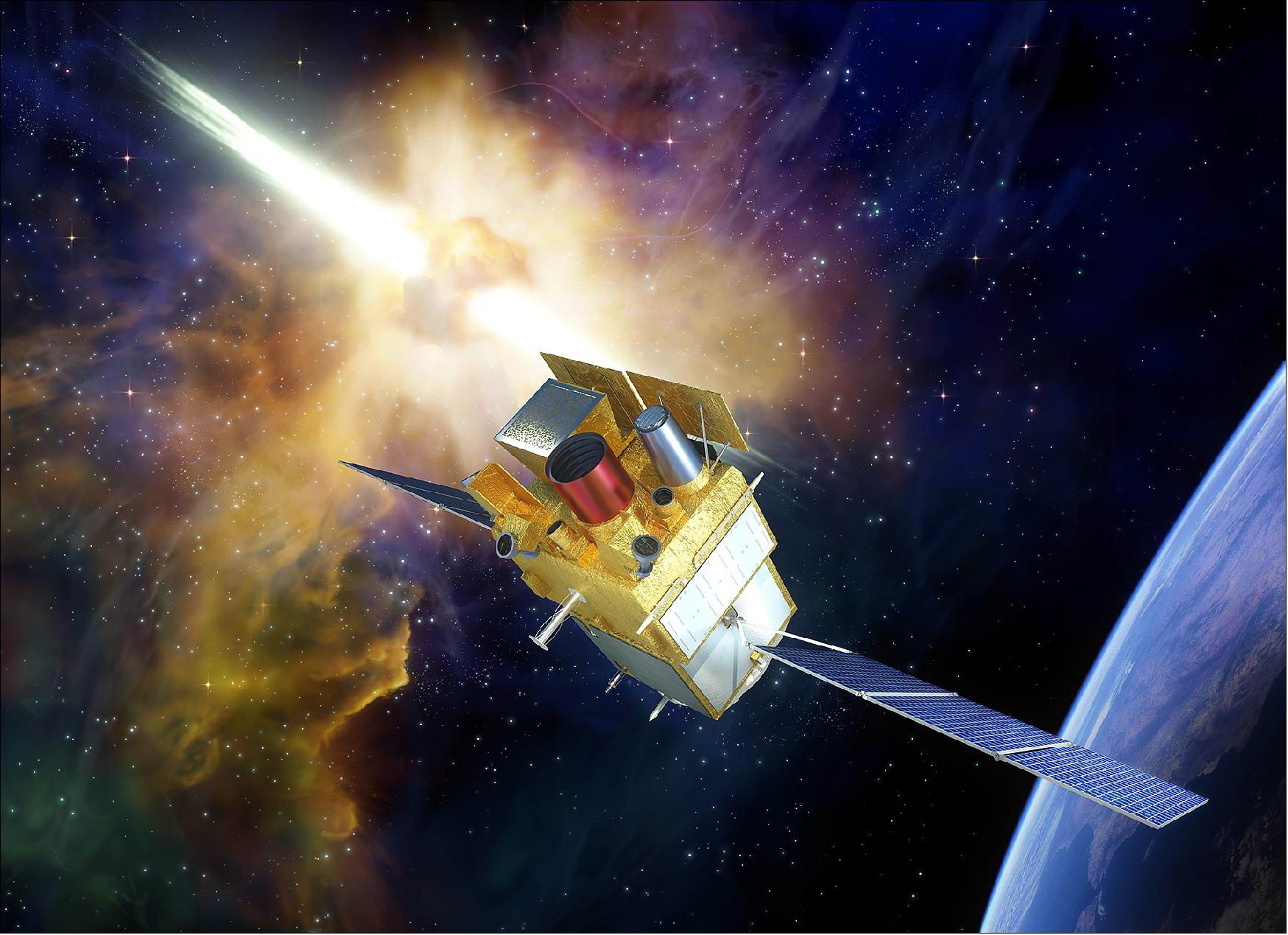
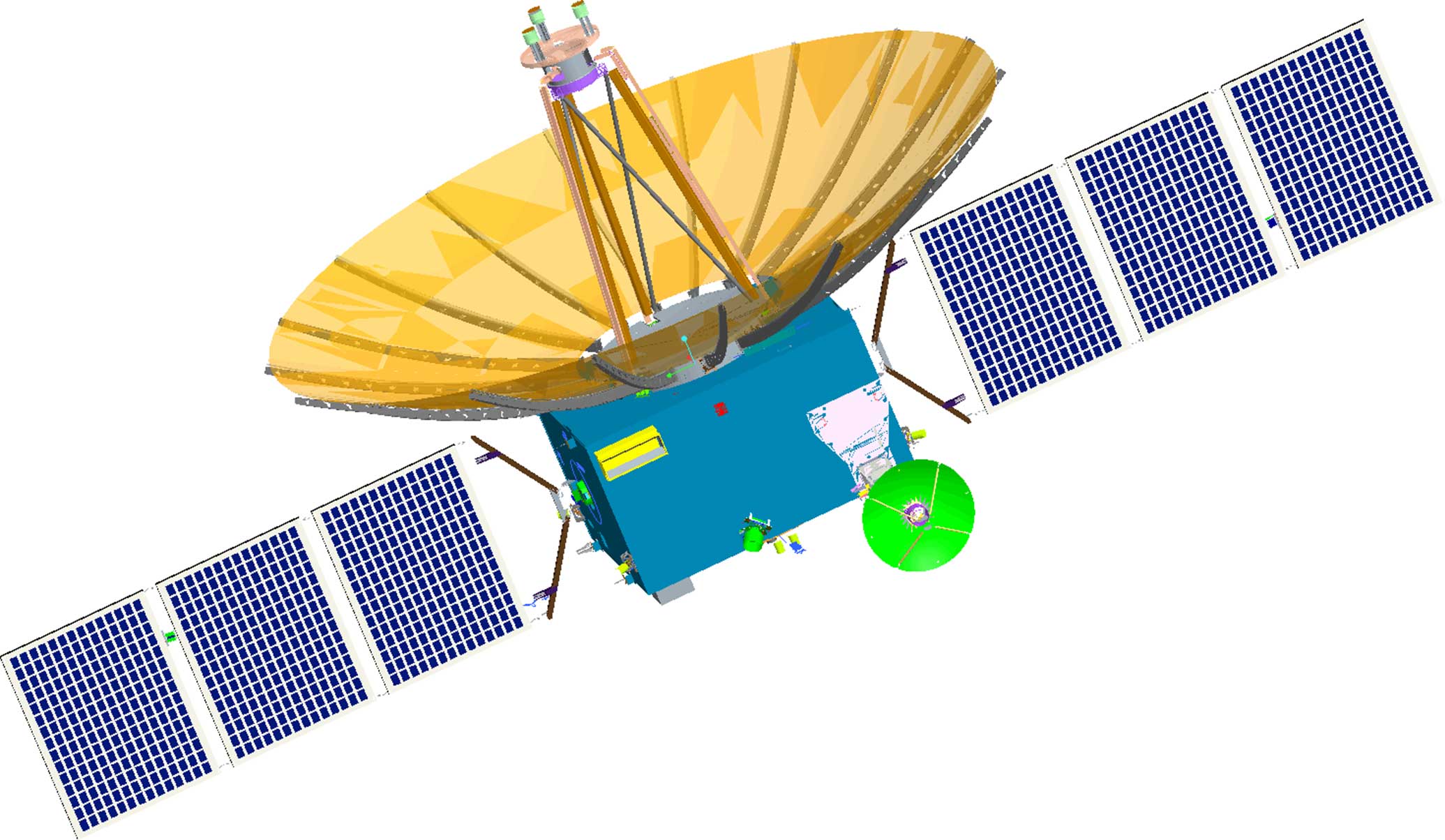
Op 22 juni om 07:00 UTC werd vanaf de lanceerbasis Xichang Satellite Launch Center de astronomie satelliet Space Variable Objects Monitor (SVOM) gelanceerd.
Het SVOM-satellietobservatorium (Space Variable Objects Monitor) is een Chinees-Frans samenwerkingsverband dat zich richt op de studie van GRB’s (Gamma-Ray Bursts). Het doel van de missie is om de krachtigste explosies in het heelal te bestuderen, terug naar de eerste generatie sterren. SVOM zal honderden GRB’s vinden die wijzen op de dood van massieve sterren of het samensmelten van twee compacte sterren. In beide gevallen produceert de explosie een zwart gat of een jonge magnetar, omgeven door materie die snel (in seconden) op het compacte object zal toenemen.
Aan boord van de satelliet bevinden zich twee hoog energie instrumenten met een groot breed waarnemingsveld:
- De ECLAIRs-telescoop voor het detecteren en lokaliseren van gamma-uitbarstingen in de röntgenband en laag-energetische gammastraling (van 4 tot 250 keV). (Frankrijk)
- De GRM (Gamma Ray Burst Monitor) om het spectrum van hoogenergetische uitbarstingen te meten (van 15 keV tot 5000 keV). (China)
Twee smalveldtelescopen die de evolutie van het nagloeien na een zwenking van de satelliet kunnen meten:
- De MXT-telescoop (Microchannel X-ray Telescope) voor de observatie van gamma-uitbarstingen in het zachte röntgenbereik (0,2 tot 10 keV). (Frankrijk)
- De VT-telescoop (Visible Telescope) die in het zichtbare bereik werkt om de zichtbare emissie te detecteren en te observeren die onmiddellijk na een gamma-uitbarsting wordt geproduceerd. (China)
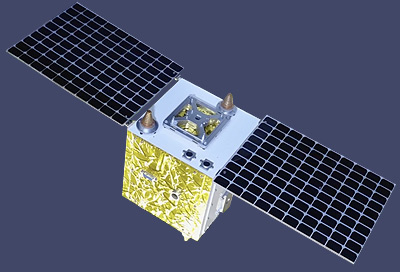
Vanaf de lanceerbasis Xichang Satellite Launch Center werd op 22 juni om 07:00 UTC de Chinese astronomie satelliet Chasing All Transients Constellation Hunters 1 (CATCH-1) gelanceerd.
De satelliet zal het dynamische universum bestuderen via röntgen follow-up waarnemingen op meerdere golflengten en verschillende type deeltjes, zoals elektromagnetische tegenhangers van zwaartekrachtgolfgebeurtenissen, röntgenbinaire structuren, snelle radio-uitbarstingen, magnetars en gammastraaluitbarstingen.
CATCH-1 is de eerste testsatelliet voor een geplande constellatie van 126 satellieten. De constellatie zal bestaan uit drie typen satellieten die elk een ander wetenschappelijk doel dienen.
- Type-A-satellieten worden gebruikt voor onmiddellijke momentbewaking na de ontdekking van het doelwit.
- Op basis van de resultaten van type-A-satellieten worden type-B-satellieten ingezet voor meer diepgaande moment-, beeldvormings- en spectroscopische follow-up-waarnemingen.
- Type-C-satellieten zijn specifiek ontworpen voor polarisatiemetingen.
CATCH 1 is een prototype voor de A-klasse satellieten.

Vanaf Guiana Space Centre werd op 09 juli om 19:00 UTC de nieuwe Europese Ariane raket gelanceerd, de Ariane 62.

De lancering verliep na een uur vertraging vlekkeloos met aan boord een aantal satellieten, een massasimulator (boilerplate), twee retourcapsules en vijf experimenten. Na 74 minuten werden de satellieten uitgezet waarna het hulpvoortstuwingssysteem van de bovenste trap van de raket kort na ontsteking uitviel.
Door deze storing was het niet meer mogelijk de twee retourcapsules uit te zetten.
Specificaties:
Aantal rakettrappen 2
Aantal boosters 2 stuks P120C
Raketmotoren:
- Eerste trap 1 stuks Vulcain 2.1
- Tweede trap 1 stuks Vinci
Afmetingen:
- Hoogte 63 meter
- Diameter 5,4 meter
Lanceer lading:
- LEO 10.350 kilogram
- HEO 3.300 kilogram
- GTO 4.500 kilogram
- SSO 7.200 / 7.000 kilogram (500 / 900km)
